







AI Discipline
Lower Deployment Threshold for Multimodal AI Large Models, Enhance On-Device Training Efficiency, and Provide Comprehensive Support from Model Implementation to Application Validation
 FR-mini
20KG
FR-mini
20KG
 MK-mini
50KG
MK-mini
50KG
 MK-mid
80KG
MK-mid
80KG
 FR-mid
100KG
FR-mid
100KG
 FR-max
300KG
FR-max
300KG
 FR-mega
600KG
FR-mega
600KG
 TK-mid
80KG
TK-mid
80KG
 DT-mini
10KG
DT-mini
10KG
 DT-mid
50KG
DT-mid
50KG
 FB-FW-IIC
150KG
FB-FW-IIC
150KG
 FW-venus
250KG
FW-venus
250KG
 NV-magic
Industrial Navigation kit
NV-magic
Industrial Navigation kit
 OS-saturn
Apollo Navigation
OS-saturn
Apollo Navigation
 GitHub
GitHub








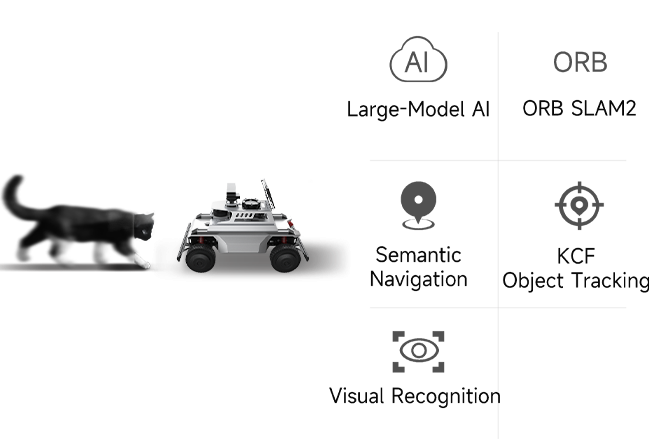
Powered by NVIDIA AI, OS-nano fuses visual and voice perception for environment understanding and enables autonomous task execution for a wide range of embodied robot applications.
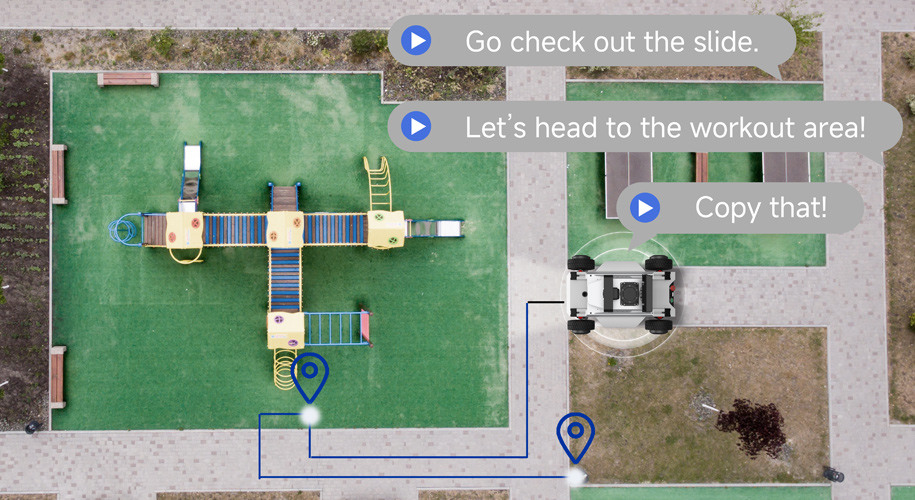
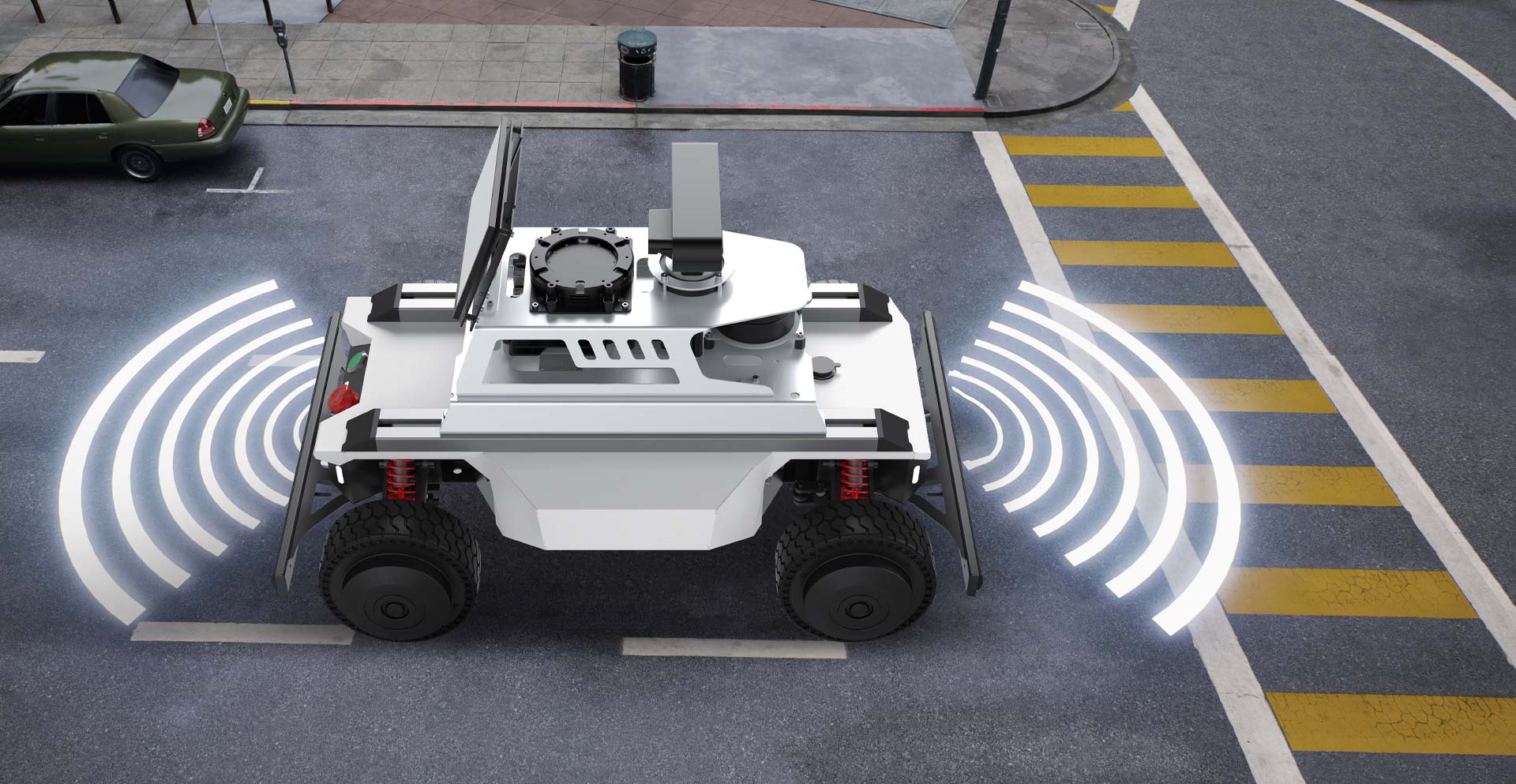
Fusion of multi-source sensing data and diverse algorithms supports navigation development and application in complex environments, laying a solid technical foundation for autonomous driving, robotics and enhanced navigation applications.
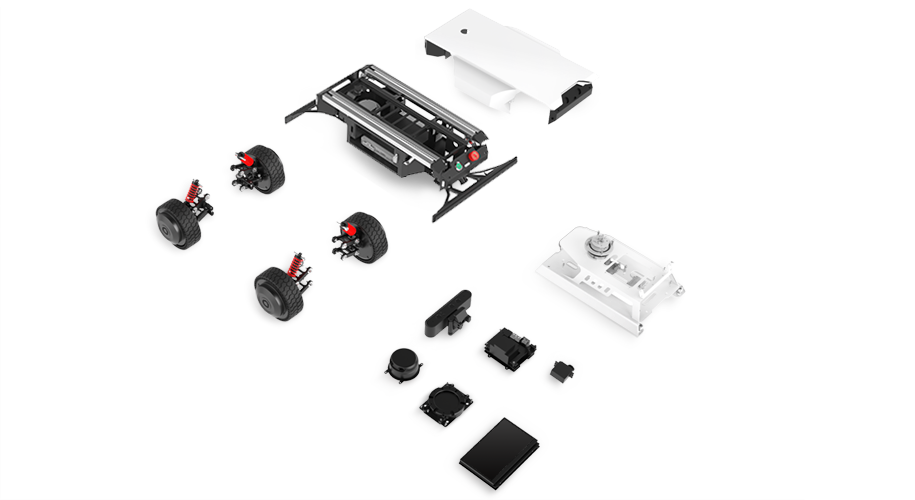
A full-process workflow covering hardware, algorithms, system integration, installation, and innovative research — designed to drive practical innovation and solve complex technical problems.
Powered by modular hardware, multimodal AI large-model deployment, and ROS ecosystem integration, OS-nano delivers an all-in-one robotics platform featuring AI algorithms, embodied interaction, autonomous navigation, and vehicle–road collaboration.
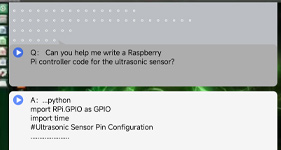
Lower Deployment Threshold for Multimodal AI Large Models, Enhance On-Device Training Efficiency, and Provide Comprehensive Support from Model Implementation to Application Validation
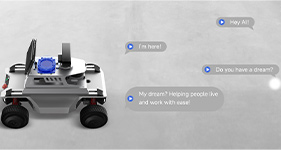
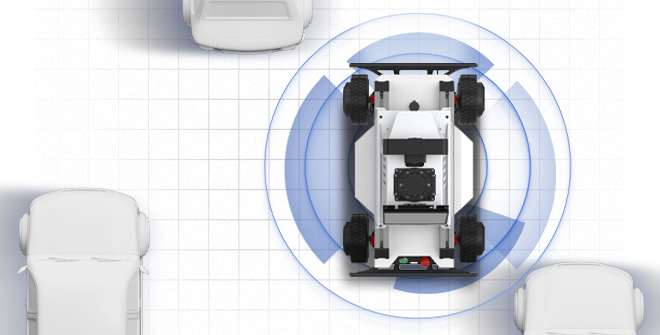
Hardware Entity + Multimodal Perception + Real-Time Action Control; Key support for agent-environment interaction intelligence development
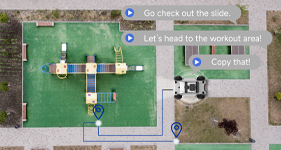
Navigation Module & Modular Chassis Building. Full-cycle support from basic learning to in-depth innovation for autonomous navigation, scenario adaptation and function expansion.

Enable the implementation of vision-based autonomous driving, advance the vehicle-environment interaction capability, and provide end-to-end full technical development solutions.


Voice Control
Lane Recognition
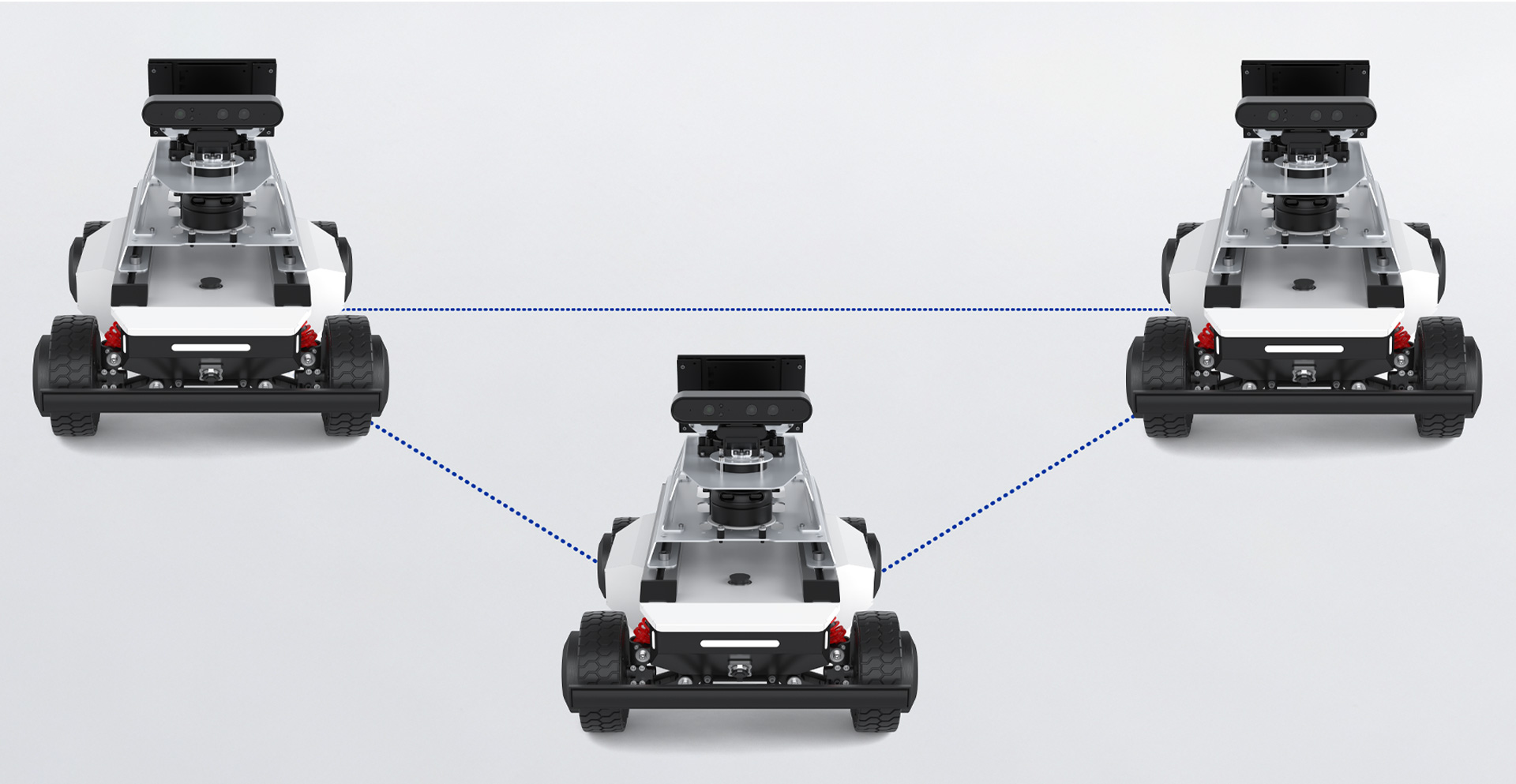
Swarm Control
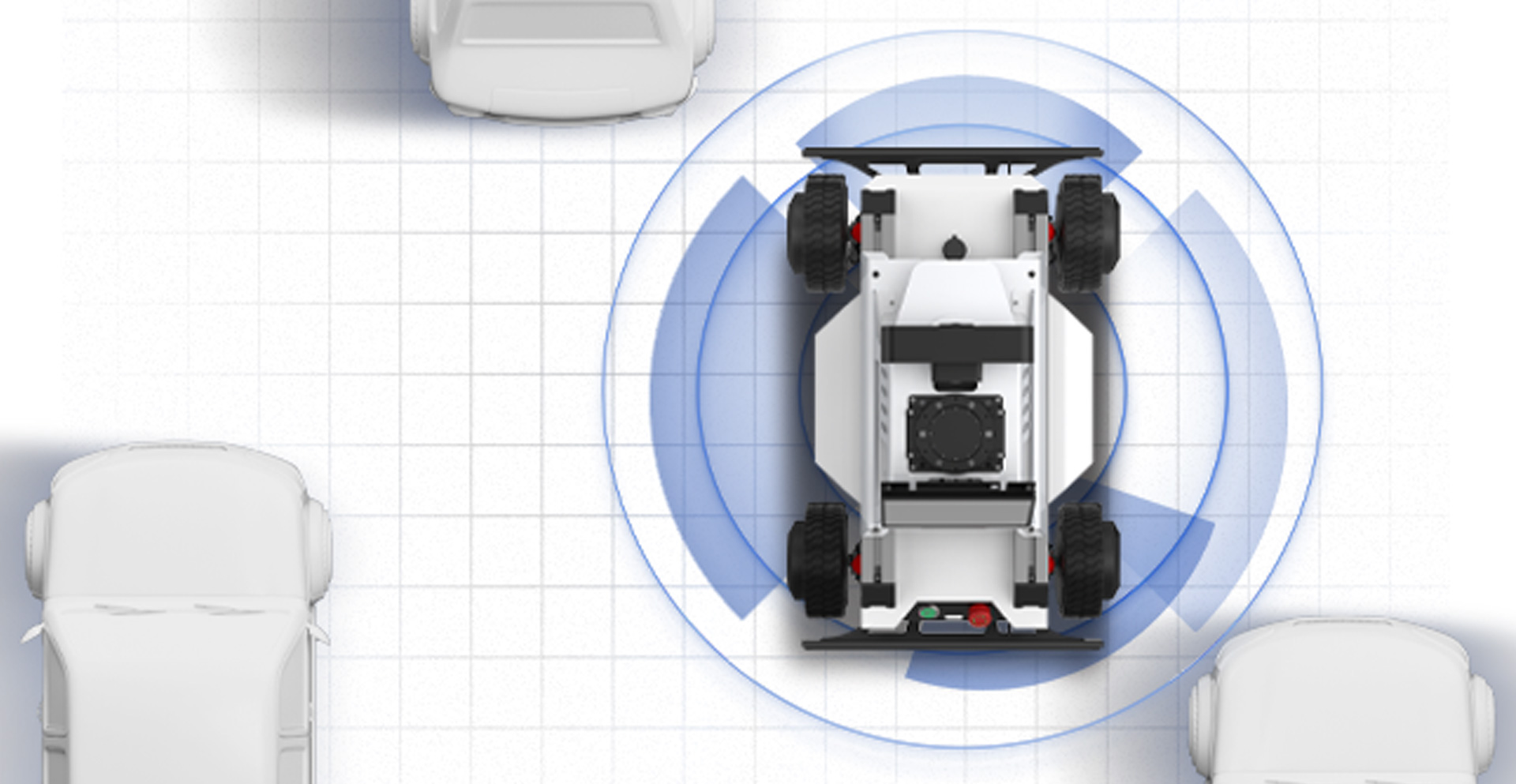
Visual Navigation
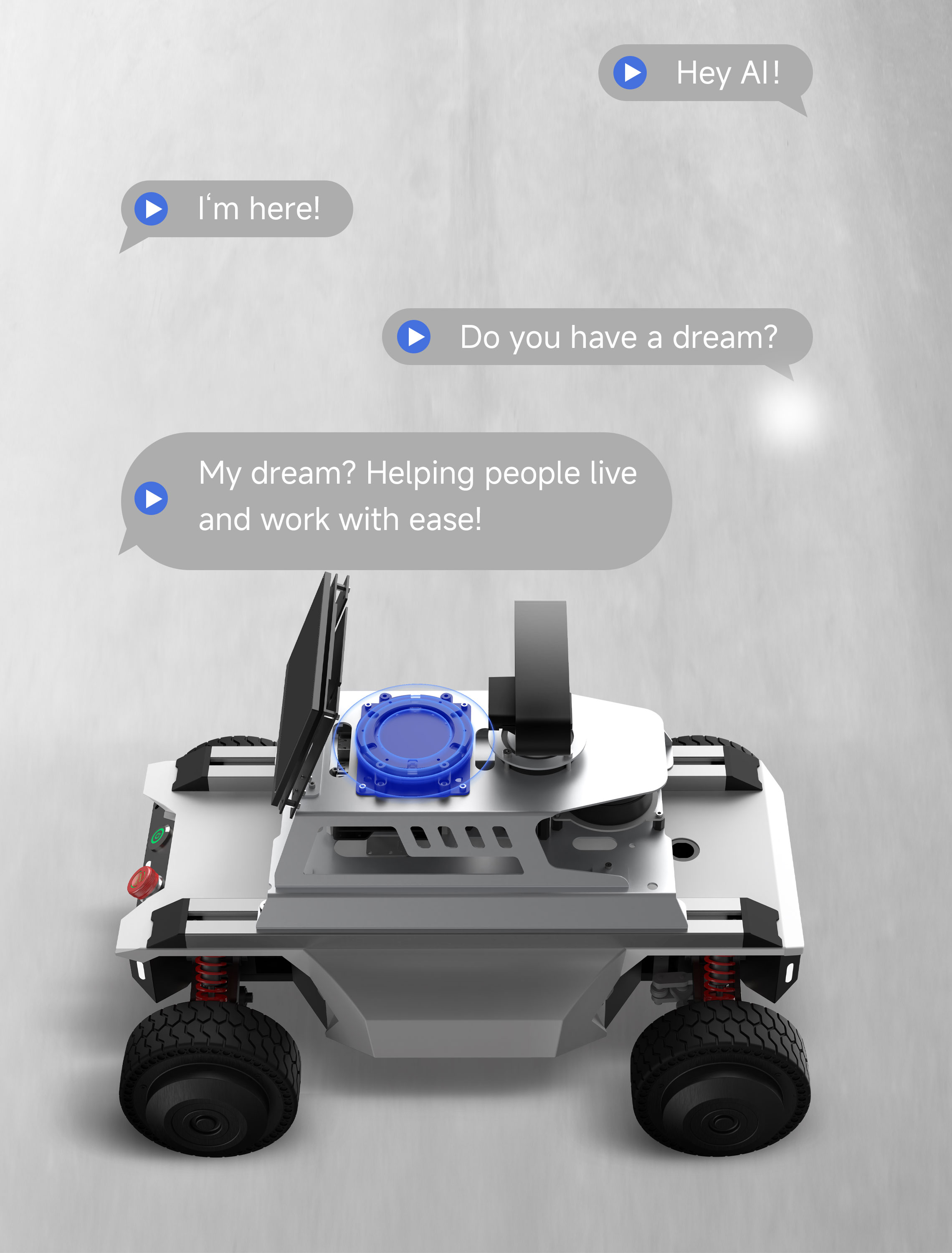
Voice Control

Lane Recognition
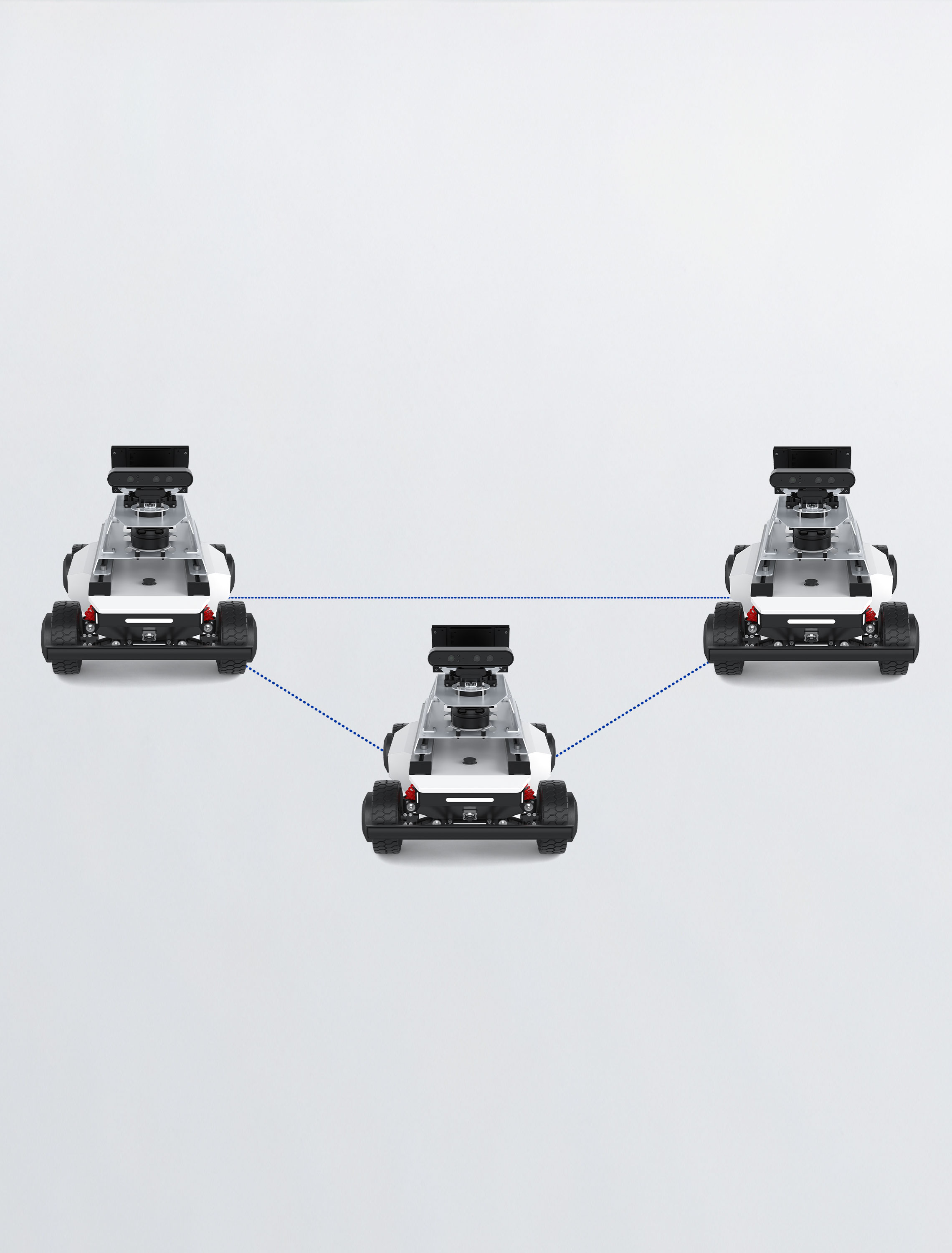
Swarm Control
Visual Navigation

Development

Training

Education

Research
Support diverse modular applications and work with you to unlock new possibilities across industries.



