







Intelligent Internet Discipline Field
Apollo Basics → In-Depth Industry Algorithms | Meets ICV Practical & Principle Needs | Supports Automotive Autonomous Navigation Precision Optimization & Algorithm Development
 FR-mini
20KG
FR-mini
20KG
 MK-mini
50KG
MK-mini
50KG
 MK-mid
80KG
MK-mid
80KG
 FR-mid
100KG
FR-mid
100KG
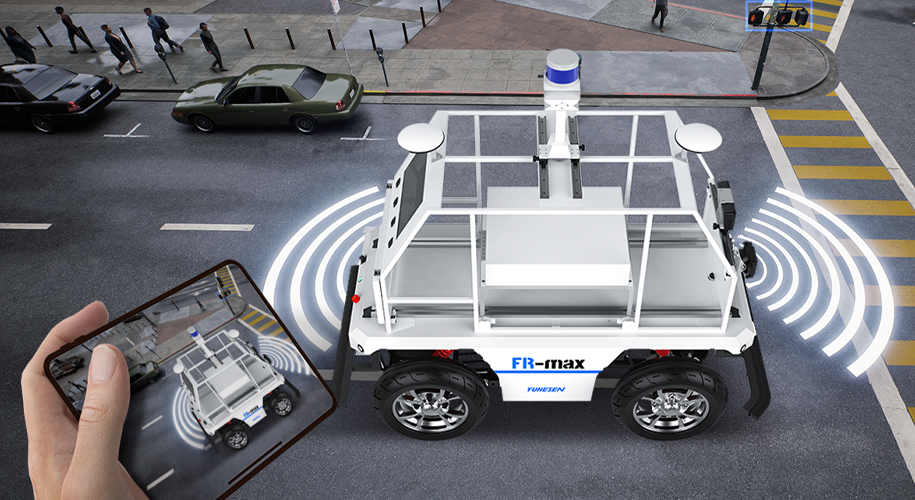
 FR-max
300KG
FR-max
300KG
 FR-mega
600KG
FR-mega
600KG
 TK-mid
80KG
TK-mid
80KG
 DT-mini
10KG
DT-mini
10KG
 DT-mid
50KG
DT-mid
50KG
 FB-FW-IIC
150KG
FB-FW-IIC
150KG
 FW-venus
250KG
FW-venus
250KG
 NV-magic
Industrial Navigation kit
NV-magic
Industrial Navigation kit
 OS-saturn
Apollo Navigation
OS-saturn
Apollo Navigation
 GitHub
GitHub






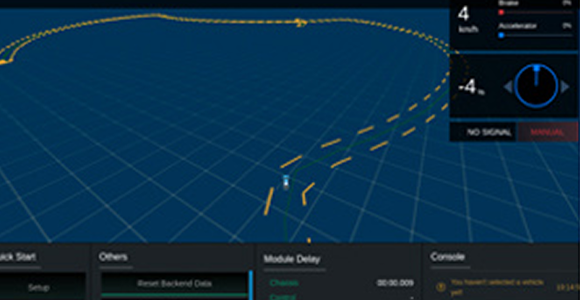
Featuring APOLLO navigation technology, it delivers an open-source structure for academic education, autonomous driving enterprises and scientific research.
Fusion of multi-source sensing data and diverse algorithms supports navigation development and application in complex environments, laying a solid technical foundation for autonomous driving, robotics and enhanced navigation applications.
From underlying hardware to upper-layer algorithms, hardware structures to system integration, and installation operations to innovative research. Build a full-process practical research framework to drive innovation and solve complex problems.

Based on the Apollo Navigation Research & Education Platform, we build a "Practice-Theory-Research" system centered on the "Perception-Localization-Planning-Control" architecture, consolidating the foundation for intelligent connected innovation.
Apollo Basics → In-Depth Industry Algorithms | Meets ICV Practical & Principle Needs | Supports Automotive Autonomous Navigation Precision Optimization & Algorithm Development

By virtue of open-source autonomous navigation, Traditional Automation Upgrade → Unmanned Autonomous Mobility + Operation Collaboration | Key Support for Mechanical Automation & Computer Info Majors

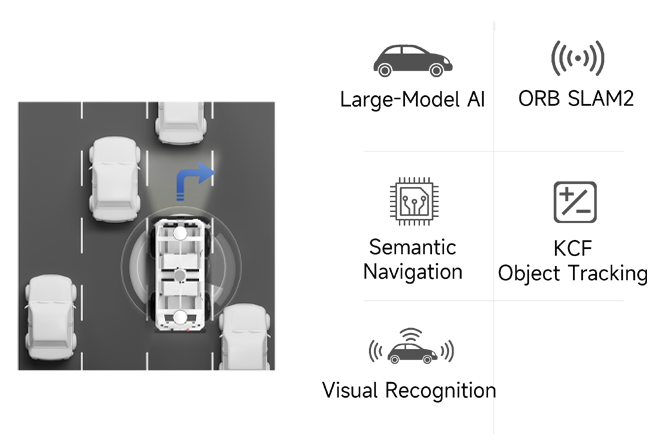
Based on "underlying open-source general AI", it covers object detection and recognition, instance segmentation, image enhancement and denoising, forming exclusive AI development capabilities centered on the "Artificial Intelligence" discipline.

RTK Fusion | Promotes smart agriculture and agricultural engineering, provides full-process technical support for the intelligent R&D of agricultural equipment, As a key connecting tool between majors and industrial implementation.

Localization

Collabration
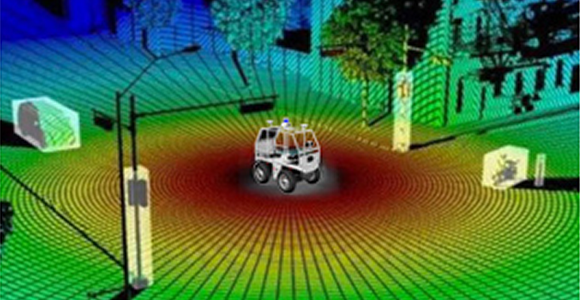
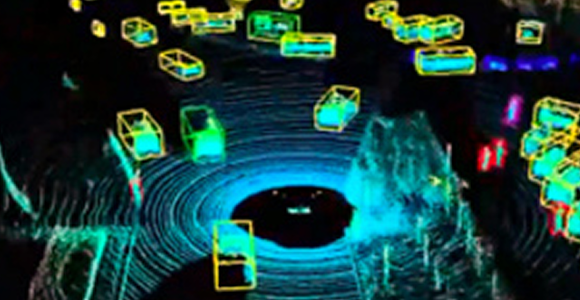
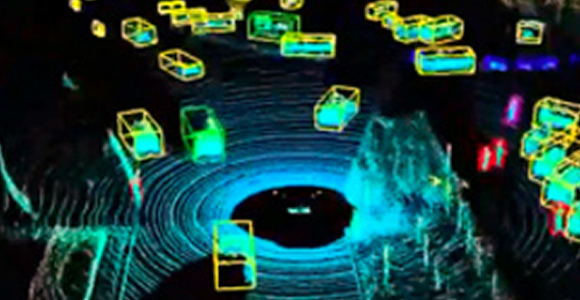
Perception
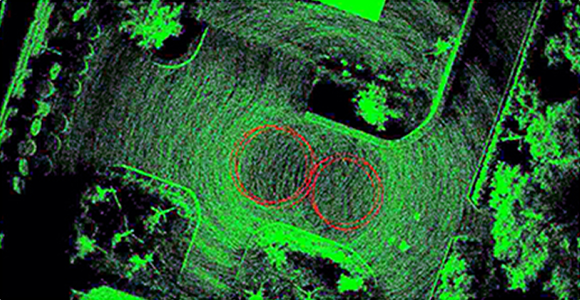
Mapping
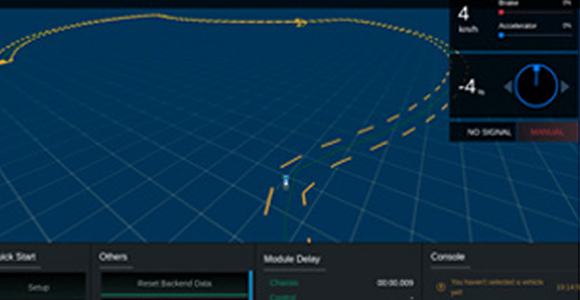
Path Planning

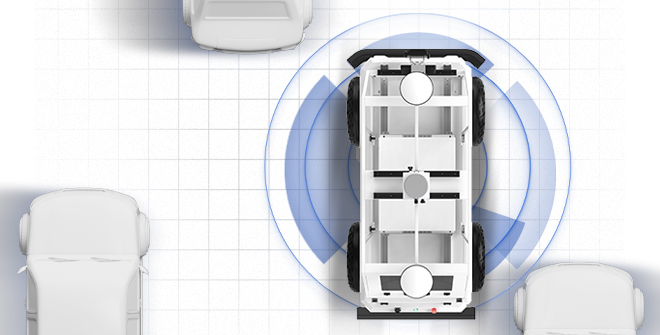
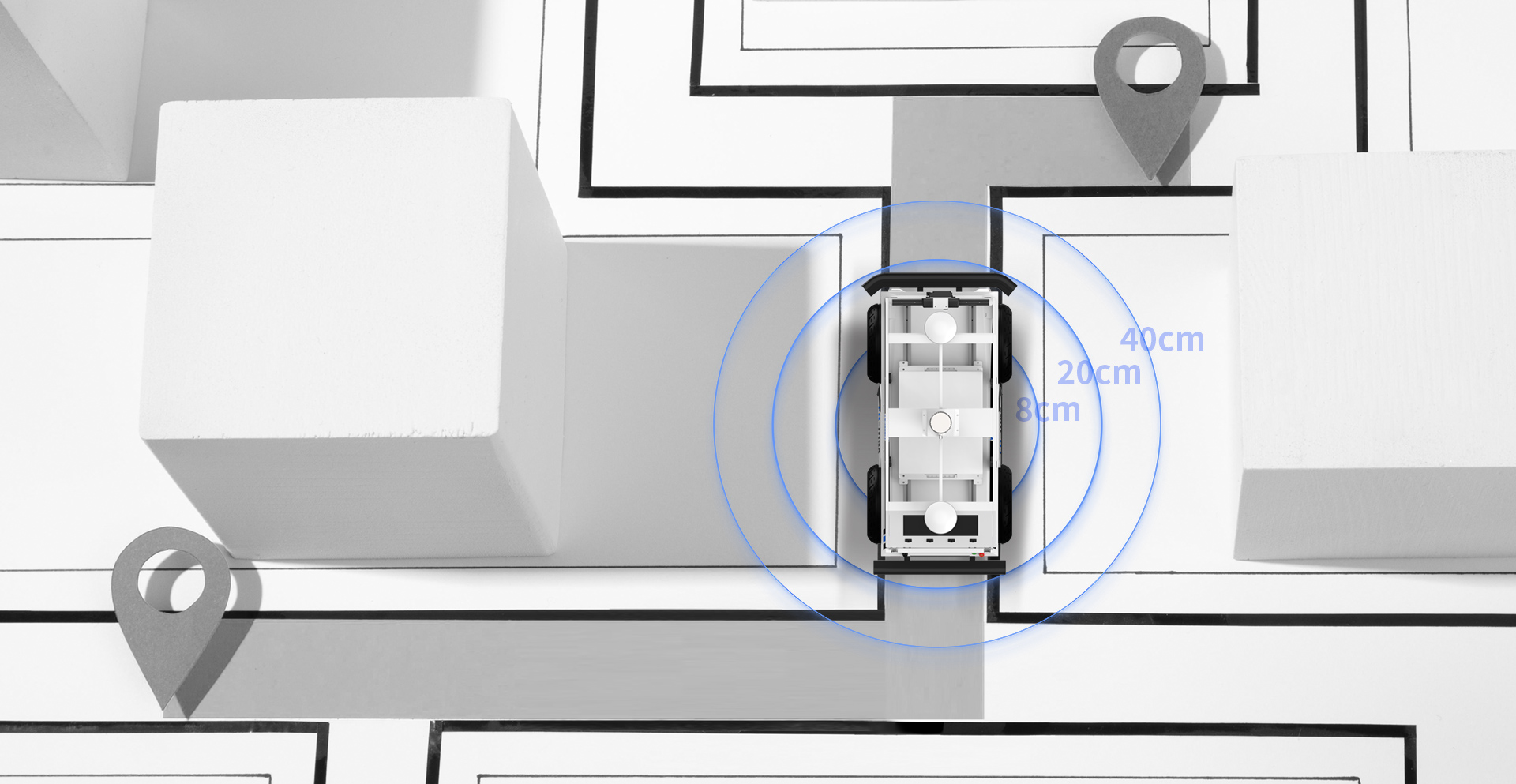
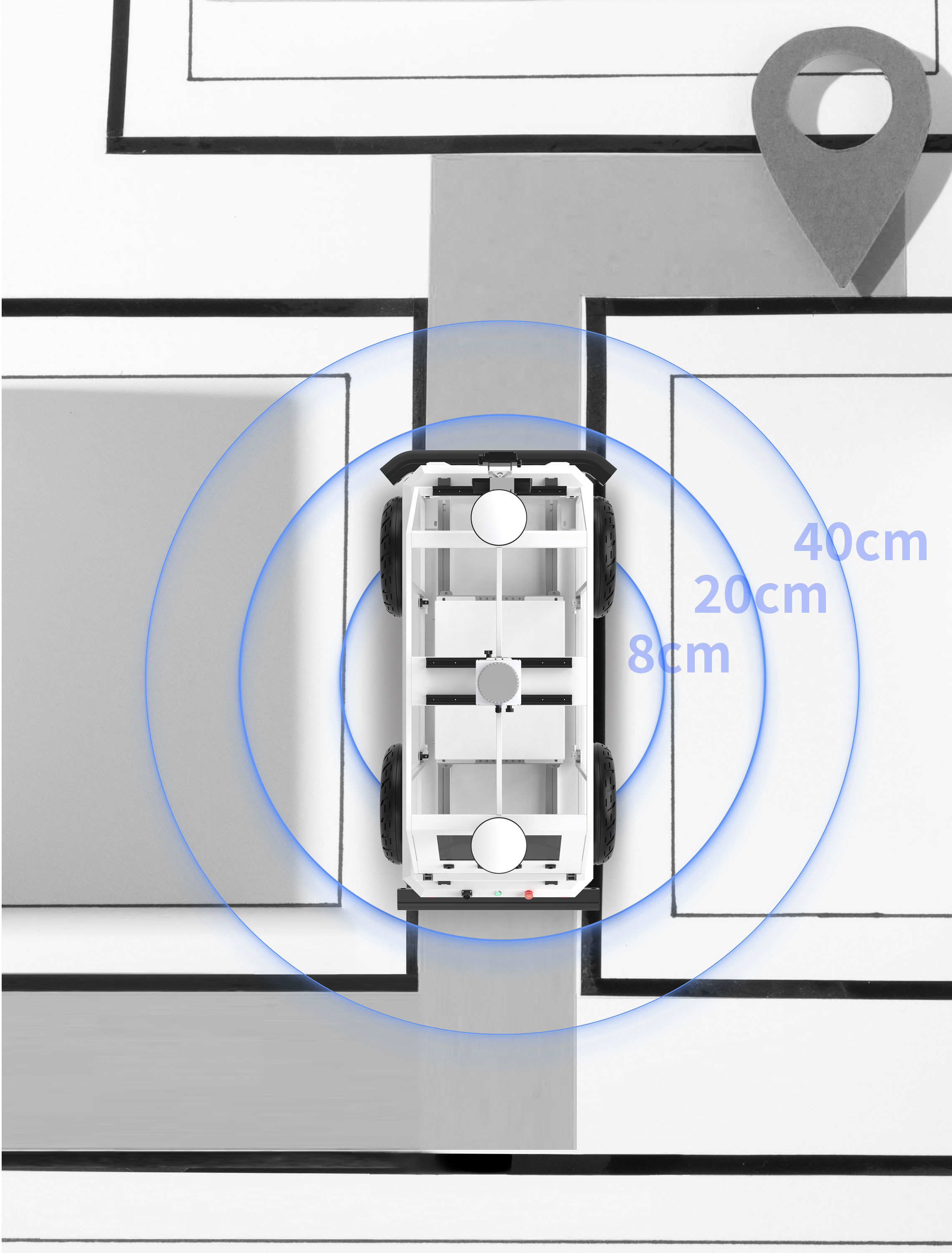
Visual Obstacle Avoidance

Sensors Fusion Perception
Obstacle Avoidance
Localization

Collabration
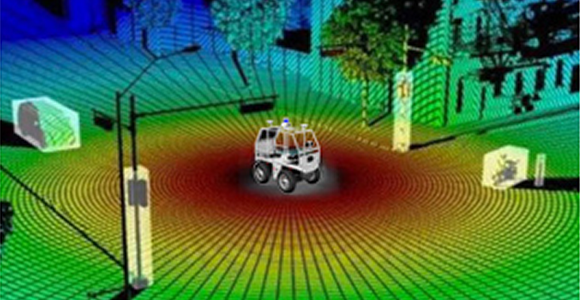
Perception
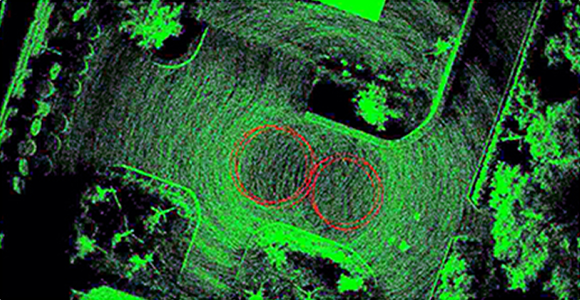
Mapping
Path Planning

Visual Obstacle Avoidance

Sensors Fusion Perception
Obstacle Avoidance

Development

Training

Education

Research
Support the deployment of various modular applications,
and jointly expand the infinite industry future with you.


